Public Types | |
| enum | ReferenceFrame { RELATIVE_RF, ABSOLUTE_RF, ABSOLUTE_RF_INHERIT_VIEWPOINT } |
Public Member Functions | |
| Transform () | |
| Transform (const Transform &, const CopyOp ©op=CopyOp::SHALLOW_COPY) | |
| Copy constructor using CopyOp to manage deep vs shallow copy. | |
| META_Node (osg, Transform) | |
| virtual Transform * | asTransform () |
| Convert 'this' into a Transform pointer if Node is a Transform, otherwise return 0. | |
| virtual const Transform * | asTransform () const |
| convert 'const this' into a const Transform pointer if Node is a Transform, otherwise return 0. | |
| virtual MatrixTransform * | asMatrixTransform () |
| virtual const MatrixTransform * | asMatrixTransform () const |
| virtual PositionAttitudeTransform * | asPositionAttitudeTransform () |
| virtual const PositionAttitudeTransform * | asPositionAttitudeTransform () const |
| void | setReferenceFrame (ReferenceFrame rf) |
| Set the transform's ReferenceFrame, either to be relative to its parent reference frame, or relative to an absolute coordinate frame. | |
| ReferenceFrame | getReferenceFrame () const |
| virtual bool | computeLocalToWorldMatrix (Matrix &matrix, NodeVisitor *) const |
| virtual bool | computeWorldToLocalMatrix (Matrix &matrix, NodeVisitor *) const |
| virtual BoundingSphere | computeBound () const |
| Overrides Group's computeBound. | |
Protected Member Functions | |
| virtual | ~Transform () |
Protected Attributes | |
| ReferenceFrame | _referenceFrame |
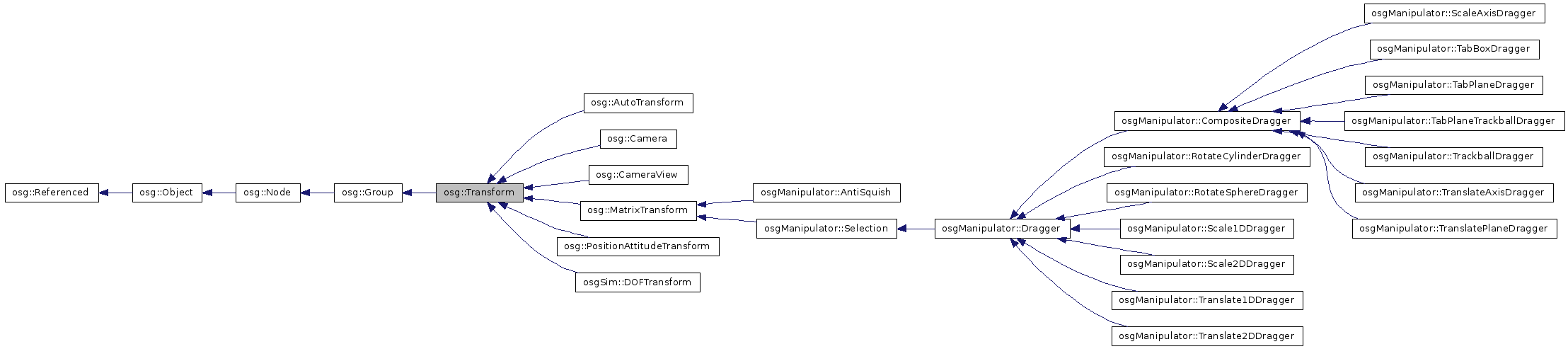
It is often used for positioning objects within a scene, producing trackball functionality or for animation.
Transform itself does not provide set/get functions, only the interface for defining what the 4x4 transformation is. Subclasses, such as MatrixTransform and PositionAttitudeTransform support the use of an osg::Matrix or a osg::Vec3/osgQuat respectively.
Note: If the transformation matrix scales the subgraph then the normals of the underlying geometry will need to be renormalized to be unit vectors once more. This can be done transparently through OpenGL's use of either GL_NORMALIZE and GL_RESCALE_NORMAL modes. For further background reading see the glNormalize documentation in the OpenGL Reference Guide (the blue book). To enable it in the OSG, you simply need to attach a local osg::StateSet to the osg::Transform, and set the appropriate mode to ON via stateset->setMode(GL_NORMALIZE, osg::StateAttribute::ON);
| osg::Transform::Transform | ( | ) |
Copy constructor using CopyOp to manage deep vs shallow copy.
| virtual osg::Transform::~Transform | ( | ) | [protected, virtual] |
| osg::Transform::META_Node | ( | osg | , | |
| Transform | ||||
| ) |
| virtual Transform* osg::Transform::asTransform | ( | ) | [inline, virtual] |
| virtual const Transform* osg::Transform::asTransform | ( | ) | const [inline, virtual] |
| virtual MatrixTransform* osg::Transform::asMatrixTransform | ( | ) | [inline, virtual] |
Reimplemented in osg::MatrixTransform.
| virtual const MatrixTransform* osg::Transform::asMatrixTransform | ( | ) | const [inline, virtual] |
Reimplemented in osg::MatrixTransform.
| virtual PositionAttitudeTransform* osg::Transform::asPositionAttitudeTransform | ( | ) | [inline, virtual] |
Reimplemented in osg::PositionAttitudeTransform.
| virtual const PositionAttitudeTransform* osg::Transform::asPositionAttitudeTransform | ( | ) | const [inline, virtual] |
Reimplemented in osg::PositionAttitudeTransform.
| void osg::Transform::setReferenceFrame | ( | ReferenceFrame | rf | ) |
Set the transform's ReferenceFrame, either to be relative to its parent reference frame, or relative to an absolute coordinate frame.
RELATIVE_RF is the default. Note: Setting the ReferenceFrame to be ABSOLUTE_RF will also set the CullingActive flag on the transform, and hence all of its parents, to false, thereby disabling culling of it and all its parents. This is neccessary to prevent inappropriate culling, but may impact cull times if the absolute transform is deep in the scene graph. It is therefore recommended to only use absolute Transforms at the top of the scene, for such things as heads up displays. ABSOLUTE_RF_INHERIT_VIEWPOINT is the same as ABSOLUTE_RF except it adds the ability to use the parents view points position in world coordinates as its local viewpoint in the new coordinates frame. This is useful for Render to texture Cameras that wish to use the main views LOD range computation (which uses the viewpoint rather than the eye point) rather than use the local eye point defined by the this Transforms' abosolute view matrix.
| ReferenceFrame osg::Transform::getReferenceFrame | ( | ) | const [inline] |
| virtual bool osg::Transform::computeLocalToWorldMatrix | ( | Matrix & | matrix, | |
| NodeVisitor * | ||||
| ) | const [inline, virtual] |
Reimplemented in osg::AutoTransform, osg::Camera, osg::CameraView, osg::MatrixTransform, osg::PositionAttitudeTransform, and osgSim::DOFTransform.
| virtual bool osg::Transform::computeWorldToLocalMatrix | ( | Matrix & | matrix, | |
| NodeVisitor * | ||||
| ) | const [inline, virtual] |
Reimplemented in osg::AutoTransform, osg::Camera, osg::CameraView, osg::MatrixTransform, osg::PositionAttitudeTransform, and osgSim::DOFTransform.
| virtual BoundingSphere osg::Transform::computeBound | ( | ) | const [virtual] |
Overrides Group's computeBound.
There is no need to override in subclasses from osg::Transform since this computeBound() uses the underlying matrix (calling computeMatrix if required).
Reimplemented from osg::Group.
Reimplemented in osg::AutoTransform.
ReferenceFrame osg::Transform::_referenceFrame [protected] |